添加售前客服
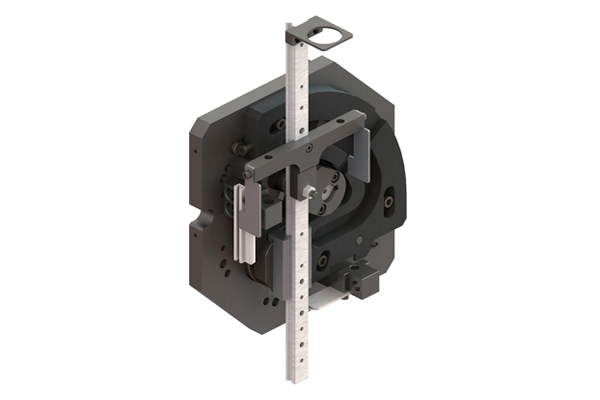
该机械手采用纯凸轮结 构,通过控制凸轮轨迹曲线 可以实现竖直进给——翻 转——水平进给的动作过 程,采用电机作为动力源, 可实现高速、准确的动作, 循环时间最小可为0.6S,定 位精度±0.02。 纯凸轮结构驱动,保证 了高速、稳定、准确的动 作,可取代传统反转机械 手; 结构紧凑、占用空间 小、外形美观;安装方便、 高效。}
苏州迅亚自动化控制技术有限公司组建于2015年,坐落在苏州高新区滨河路625号创业大厦。公司专注于机器人+多轴运动平台/视觉系统/涂胶系统的开发与销售,提供机器人系统解决方案、售后维修升级改造。同时也和台湾TOYO模组形成战略合作,是TOYO模组在中国的核心备货商,负责直线模组的批发销售。
公司围绕着ABB机器人、汇川机器人、AUBO协作机器人、TOYO模组等核心自动化部件进行系统开发与销售服务,拥有一支50人+经验丰富、技术力量雄厚、富于创新意识的技术团队,售前今均有保障,长期服务各大智能装备公司与核心终端工厂。
产品简介:
取放模组PP系列-90°该机械手采用纯凸轮结构,通过控制凸轮轨迹曲线可以实现竖直进给——翻转——水平进给的动作过程,采用电机作为动 力源,可实现高速、准确的动作,循环时间最小可为0.6S,定位精度±0.02。
产品特性:
纯凸轮结构驱动,保证了高速、稳定、准确的动作,可取代传统反转机械手; 结构紧凑、占用空间小、外形美观; 安装方便、高效。
应用场合:
在圆盘分度系统上高速上料、下料; 料盘上高速摆料或取料; 组合到其它机构(如机械手)上用于高速翻转移载







上一篇:取放模组PP系列-180°
下一篇:没有了!

0512-65192460
联系人:沈经理
手机:13218862178
邮箱:swk@szpcbase.com
地址:苏州市相城区望亭镇巨华路89号3号厂房
Copyright © 2019- 苏州迅亚自动化控制技术有限公司 版权所有
备案号:苏ICP备19069511号-1
主营:abb机器人 直线电机 直线模组 线性模组 滑台
微信扫一扫加关注